Tư Vấn
6 điểm bạn nên cân nhắc trước khi chọn cảm biến laser

Th5
6 cách lựa chọn và căn chỉnh cảm biến Laser để giảm các vấn đề xảy ra
Ngày nay cảm biến được sử dụng vô cùng nhiều trong lĩnh vực đo lường, tự động hóa. Và một trong những loại cảm biến được sử dụng rất phổ biến là laser sensor. Đo khoảng cách bằng cảm biến laser, phát hiện vật… là những ứng dụng thực tiễn nhất của nó. Dưới đây là 6 cách xử lý chống nhiễu cho cảm biến laze.
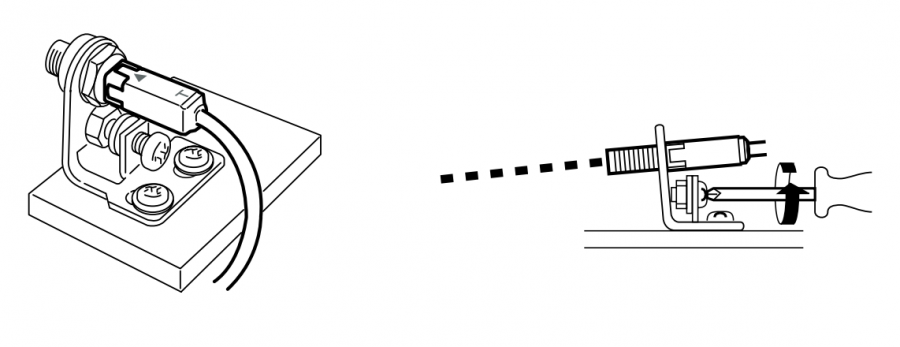
Cách 1: Thực hiện các biện pháp để chống sai lệch trục quang sau khi lắp đặt (mô hình ThruBeam)
Nguyên nhân và ảnh hưởng của sự sai lệch trục quang học là gì?
- Nguyên nhân dẫ đến sự lệch hướng có thể bao gồm các vít lắp rời, cảm biến laser bị rung và các vấn đề khác.
- Nếu trục quang bị lệch, nó có thể bật hoặc tắt mà không được cảnh báo. Dẫn đến thiết bị hoạt động sai.

Lựa chọn và biện pháp xử lý
[1] Ngoài việc thực hiện các biện pháp để ngăn và giảm rung và vít bị lỏng, thì đối với cảm biến, bạn hãy làm cho khoảng cách hoạt động càng ngắn càng tốt


Tham khảo:
- Ở khoảng cách xa hơn, các dao động tinh tế và sai số góc dẫn đến sai lệch vị trí tia laze. Nếu bạn không quan tâm đến sự lan truyền của chùm tia laser thì một phương pháp để ngăn chặn vấn đề này là chọn một loại cảm biến laze với một chùm tia lan rộng như một cảm biến sợi quang.

Cách 2: Ngăn chặn ánh sáng xung quanh ảnh hưởng đến cảm biến Laser
(mô hình Thrubeam / retro-phản xạ / phản xạ / cố định)
Ảnh hưởng của ánh sáng xung quanh là gì?
- Đèn biến tần (inverter lights) và đèn huỳnh quang tạo ra ánh sáng xung được coi là ánh sáng môi trường xung quanh cho cảm biến.
- Khi ánh sáng xung quanh đi vào bộ thu của cảm biến, cảm biến sẽ nhận nhầm ánh sáng này với tia sáng riêng của nó. Dẫn đến ảnh hưởng đến tín hiệu đầu ra, làm cho tín hiệu đầu ra bị nhiễu.
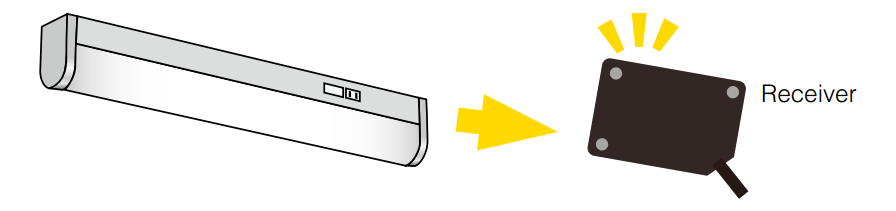
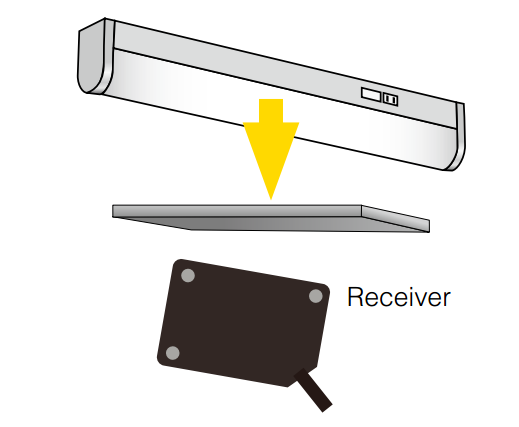
Lựa chọn và biện pháp xử lý [1] Đặt một tấm chắn giữa nguồn sáng xung quanh và bộ cảm biến laze.
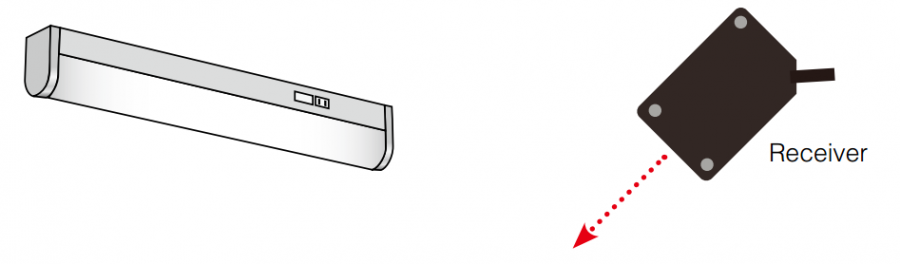

Tham khảo:
- Nhiều cảm biến laser hoạt động trên nguyên tắc mà chúng phát ra và nhận được xung của riêng chúng. Do đó, chúng bị ảnh hưởng rất nhiều bởi ánh sáng xung quanh tạo ra ánh sáng xung. Trong trường hợp như vậy, nếu nguồn sáng là ánh sáng điện trực tiếp (vd: ánh sáng đèn sợi đốt), nó có thể làm giảm khả năng xảy ra gây ra nhiễu sensor.
Cách 3: Ngăn chặn ảnh hưởng của bụi bẩn, chất bẩn (mô hình Thrubeam / retro-phản xạ / phản xạ / cố định)
Ảnh hưởng của bụi bẩn là gì?
- Khi bụi bẩn hoặc nước tích tụ trên bề mặt phát hiện của cảm biến, nó có thể xuất ra kết quả ngay cả khi không có vật thể
- Ngoài ra, đối với các loại cảm biến laze không có chống thấm, trong trường hợp xấu nhất, nước tích tụ trên đầu phát hiện có thể làm cho nó bị vỡ.

Lựa chọn cảm biến và biện pháp xử lý
1. Đối với các mô hình thu – phát hoặc có tấm quang phản xạ
- Chọn loại công suất cao sẽ không gây ra nhiễu khi có lượng bụi vừa phải.
- Ngoài ra, trong trường hợp nước có thể bám vào đầu phát hiện của cảm biến laze, MHA khuyên bạn nên sử dụng loại có chống thấm trên đầu phát hiện.

2. Đối với các mô hình thu phát tích hợp
- Chọn loại có bộ phát và bộ thu trước.
- Điều này sẽ giảm bớt tác động của bụi và chất bẩn ở khoảng cách gần trên phản xạ khuếch tán.
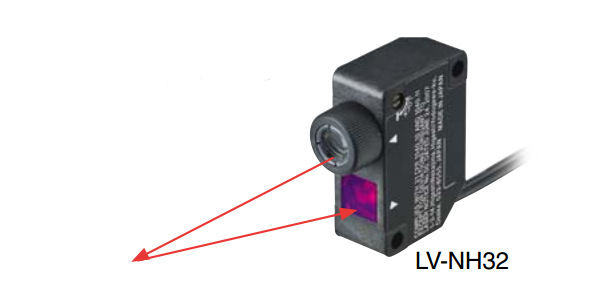
3. Chọn một module khuếch đại riêng. Sử dụng hai tín hiệu đầu ra trong khi đo thông số kỹ thuật cường độ ánh sáng nhận được (một cho phát hiện vật thể và một để phát hiện cường độ ánh sáng nhận được).

Tham khảo
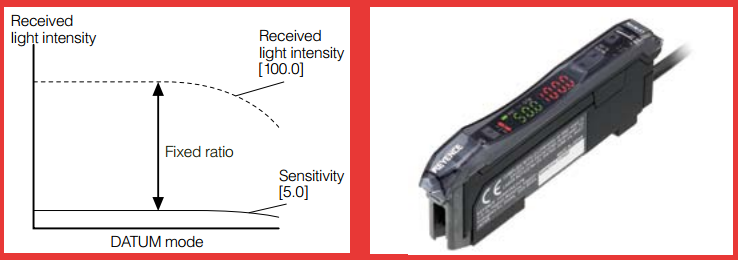
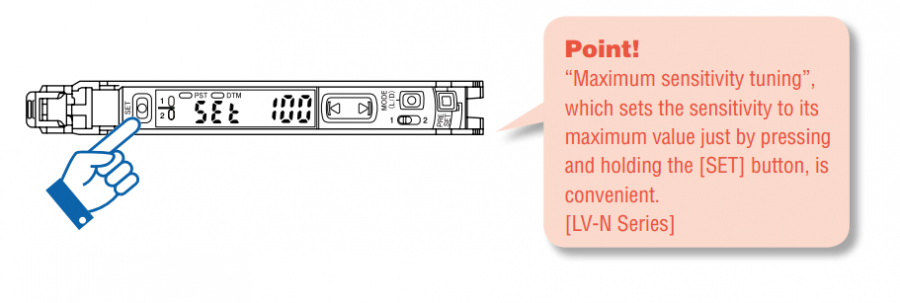
Trong cảm biến laser, có một cơ chế có thể tự động điều chỉnh độ nhạy và thường xuyên duy trì cảm biến ở một tỷ lệ cố định khi bề mặt cảm biến phát hiện bị bẩn.
[LV-N Series]
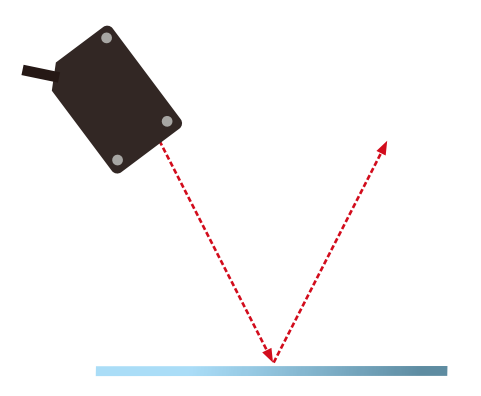
Cách 4: Biện pháp để chống lại điều kiện bề mặt vật thể (mô hình phản xạ / khoảng cách cố định)
Ảnh hưởng của thay đổi điều kiện bề mặt là gì?
- Sự biến đổi màu sắc, sự khác biệt về vật liệu, cũng như bề mặt bị lồi ra, thụt vào có thể làm cho cường độ ánh sáng nhận được dao động và tín hiệu xuất ra bị thay đổi on/off mà không được cảnh báo trước.
- Do các chùm tia nhỏ tập trung tại chỗ, các cảm biến laser mô hình phản xạ (thu phát tích hợp) nói riêng dễ bị ảnh hưởng bởi các thay đổi về điều kiện bề mặt.
Lựa chọn và cách xử lý
[1] Chọn loại có chùm tia laser trong toàn bộ khu vực hoặc loại có đường kính chùm có thể điều chỉnh được và đặt chùm tia tại chỗ lớn.
Khi chùm tia tại chỗ lớn, các tín hiệu phát hiện trên bề mặt vật thể cần phát hiện trung bình có thể giúp cho tín hiệu ổn định hơn.

Tham khảo:
- Cảm biến laser mô hình khoảng cách cố định KEYENCE GV Series sử dụng CMOS để phát hiện khoảng cách giữa nó và mục tiêu và tự động điều chỉnh cường độ ánh sáng truyền của riêng nó để phản ứng với cường độ ánh sáng phản xạ và do đó có đặc tính góc cao và khả năng thay đổi màu.

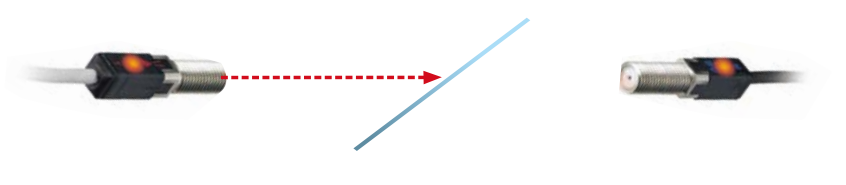
Cách 5: Ngăn chặn sự nhầm lẫn của các đối tượng trong suốt (mô hình phản chiếu Retro)
Tại sao khó phát hiện các đối tượng trong suốt?
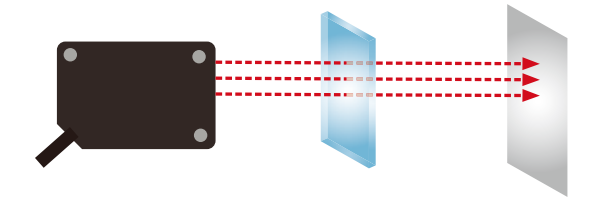
- Đối tượng trong suốt có tốc độ truyền cao và thường là trường hợp có sự khác biệt đầy đủ về cường độ ánh sáng nhận được với sự hiện diện / vắng mặt của vật thể trong suốt.
- Do đó, tùy thuộc vào vị trí của phản xạ, dao động tinh tế trong cường độ ánh sáng nhận được và các biến thể cường độ ánh sáng khác có thể có tác động tiêu cực đến phát hiện vật của cảm biến laze.
Lựa chọn và biện pháp xử lý
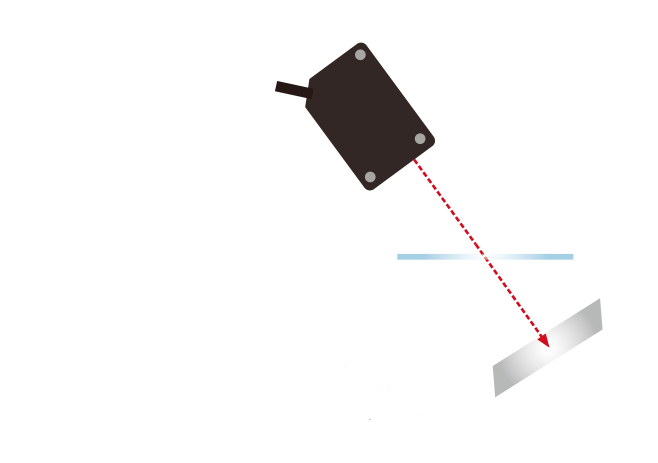
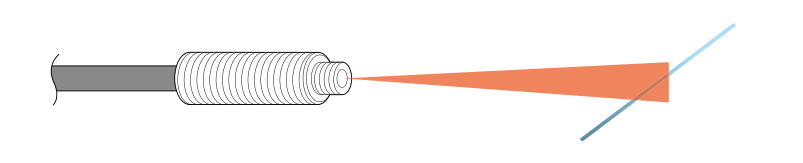
[1] Đối với hướng nhập vào đối tượng trong suốt, lắp đặt cảm biến laser sao cho trục quang không vuông góc, nhưng ở một góc.
Điều này sẽ làm tăng diện tích dầm xiên và sẽ làm cho nó khó khăn hơn cho các phản xạ gương được nhận từ phôi gia công, điều này sẽ giúp dễ dàng bảo đảm sự khác biệt cường độ ánh sáng nhận được khi phôi có mặt / vắng mặt.


Tham khảo
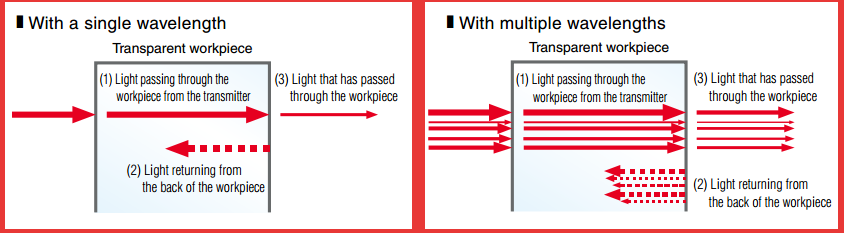
- Mô hình phản xạ retro LV-S62 / S63 sử dụng nhiều bước sóng cho nguồn ánh sáng laser của nó, làm cho nó phù hợp để phát hiện các vật trong suốt.
- Bằng cách va chạm ánh sáng (1) và (2) ở một bước sóng, ánh sáng (3) có thể trở nên không ổn định. Với nhiều bước sóng, các chùm tia với các bước sóng khác nhau được phát ra để giảm ảnh hưởng của ánh sáng từ (2) càng nhiều càng tốt, làm cho nó có thể ổn định cường độ ánh sáng của (3).
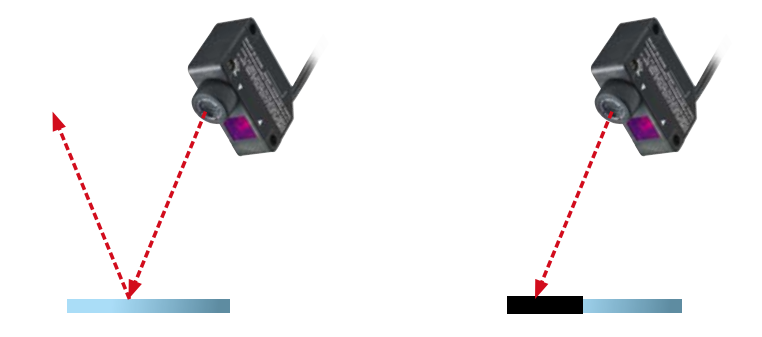
Cách 6: Ngăn chặn sự nhầm lẫn của các đối tượng có bề mặt gương (các mô hình phản xạ / khoảng cách cố định)
Tại sao khó phát hiện các vật thể có gương?
- Đối tượng có tính gương dễ dàng tạo ra phản xạ, và vì điều này, khi góc được thay đổi, chùm tia laser có độ thẳng cao sẽ không được trả lại cho bộ thu và có thể không đảm bảo cường độ ánh sáng nhận được.
(Đương nhiên, điều này bị ảnh hưởng bởi sự phản xạ của vật thể được phản chiếu, bụi bẩn và các điều kiện bề mặt khác.)
Lựa chọn và biện pháp xử lý
[1] Nếu thực hiện phát hiện bằng cảm biến laser mô hình phản xạ hoặc khoảng cách cố định, việc thực hiện dò tìm ở một góc nhỏ hoặc nhắm mục tiêu một phần của đối tượng không được hiển thị trên gương sẽ giúp phát hiện dễ dàng hơn.
Tham khảo
- Cảm biến mô hình khoảng cách cố định sử dụng nguyên lý triangulation để thực hiện phát hiện, khiến cho nó khó bị ảnh hưởng bởi các điều kiện bề mặt.
- Tuy nhiên, nếu độ phản xạ của vật thể là khá cao, có thể không thể phát hiện đúng vị trí của chùm tia tại chỗ, vì vậy chúng tôi khuyên bạn nên thực hiện kiểm tra trước.
